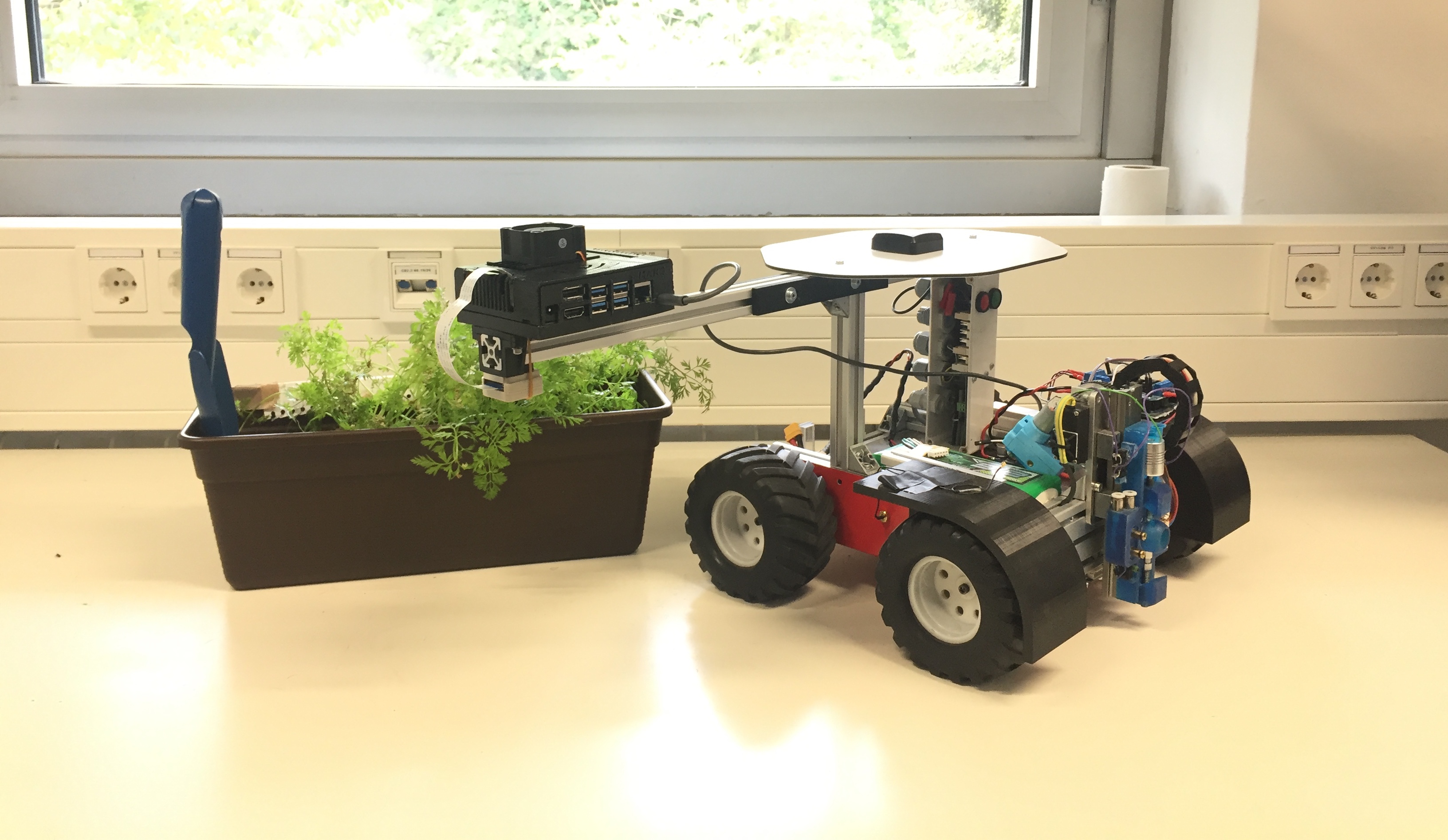
Computer Vision Project - Weed Detection for Mobile Base Robot
I worked on a project at Technical University of Berlin in collaboration with external company solving the problem of weed detection on carrot fields. The outcome, developed by the Team I was a member of, consisted of two algorithms with different characteristics and robustness validated on real-world field.
View on GitHub
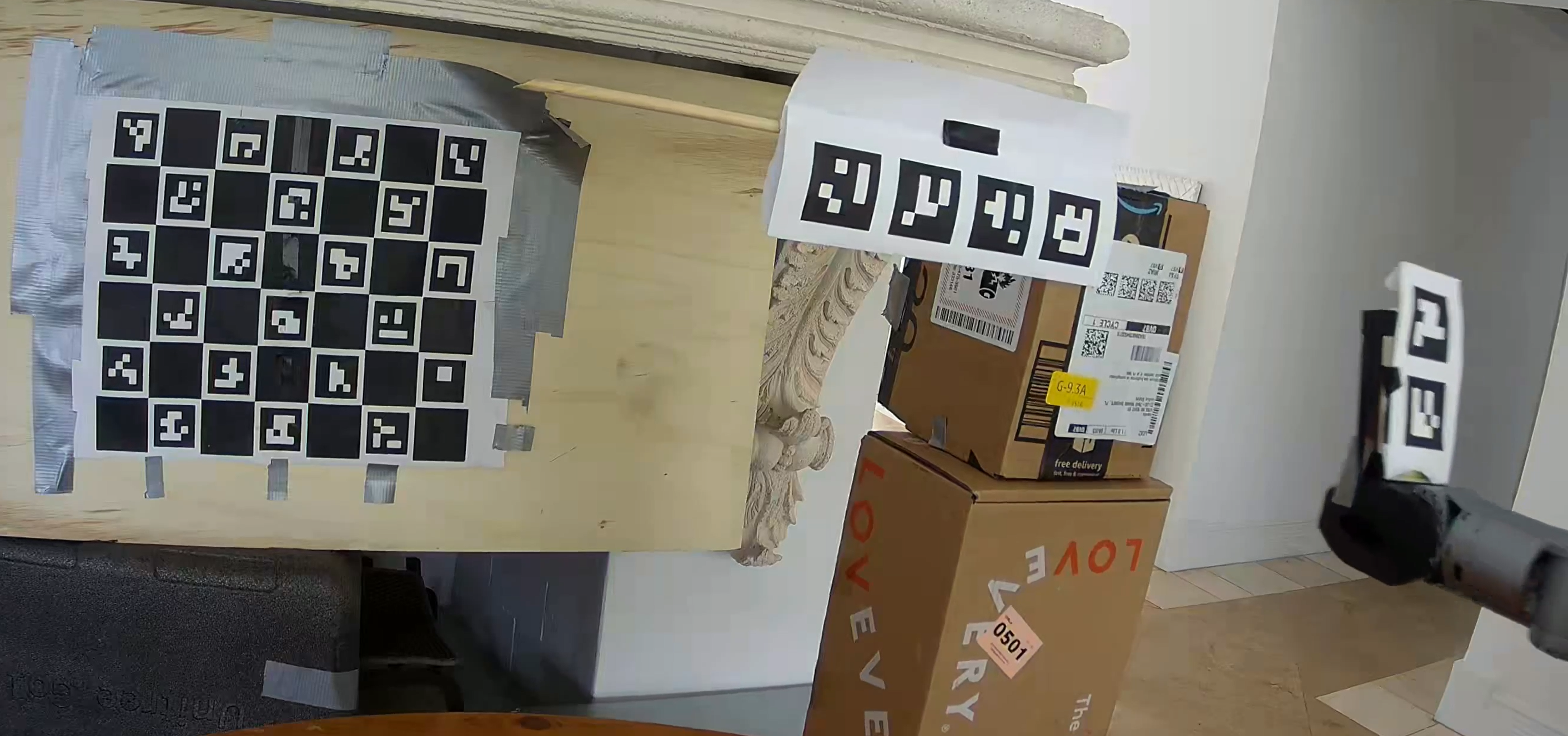
Remote Cockpit Assistant - Manipulator Robot Replacing Second Pilot
Joined a startup company funded and operated by Keith Siilats and collaborated on a project utlized a manipulator robot who will be capable of detecting anomalies in vehicle behaior and support the main pilot during is opeations. The codebase is unavailable due to the non-disclosure agreement. Photos are provided but they do not revel the gist and main developemnt of the project.
Verlma Robot Manipulator Steering Project
Project realized at Warsaw University of Technology divided into two stages - handling odometry in mobile base robot Tiago and steering manipulator robot Verlma. Handling topics such as encoder data processing and impedance control was the main focus of the work.
View on GitHub
Forcasting Project
Time-series forecasting pipeline for predicting 28-day retail product demand from historical sales data. Feature engineering with lag variables and recursive multi-step forecasting using a histogram-based gradient boosting model.
View on GitHub
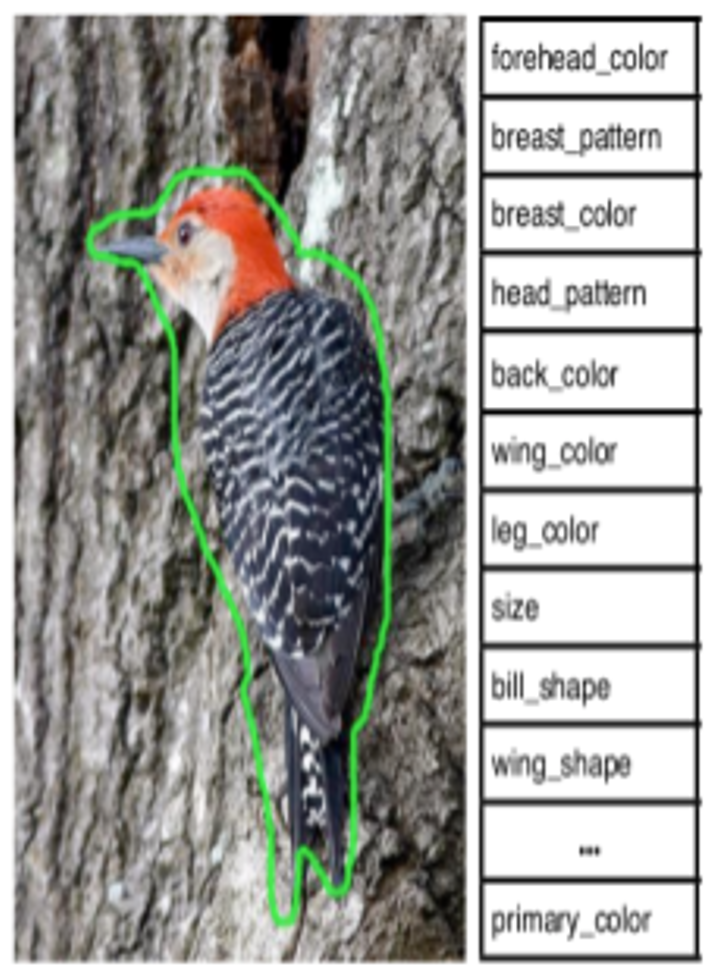
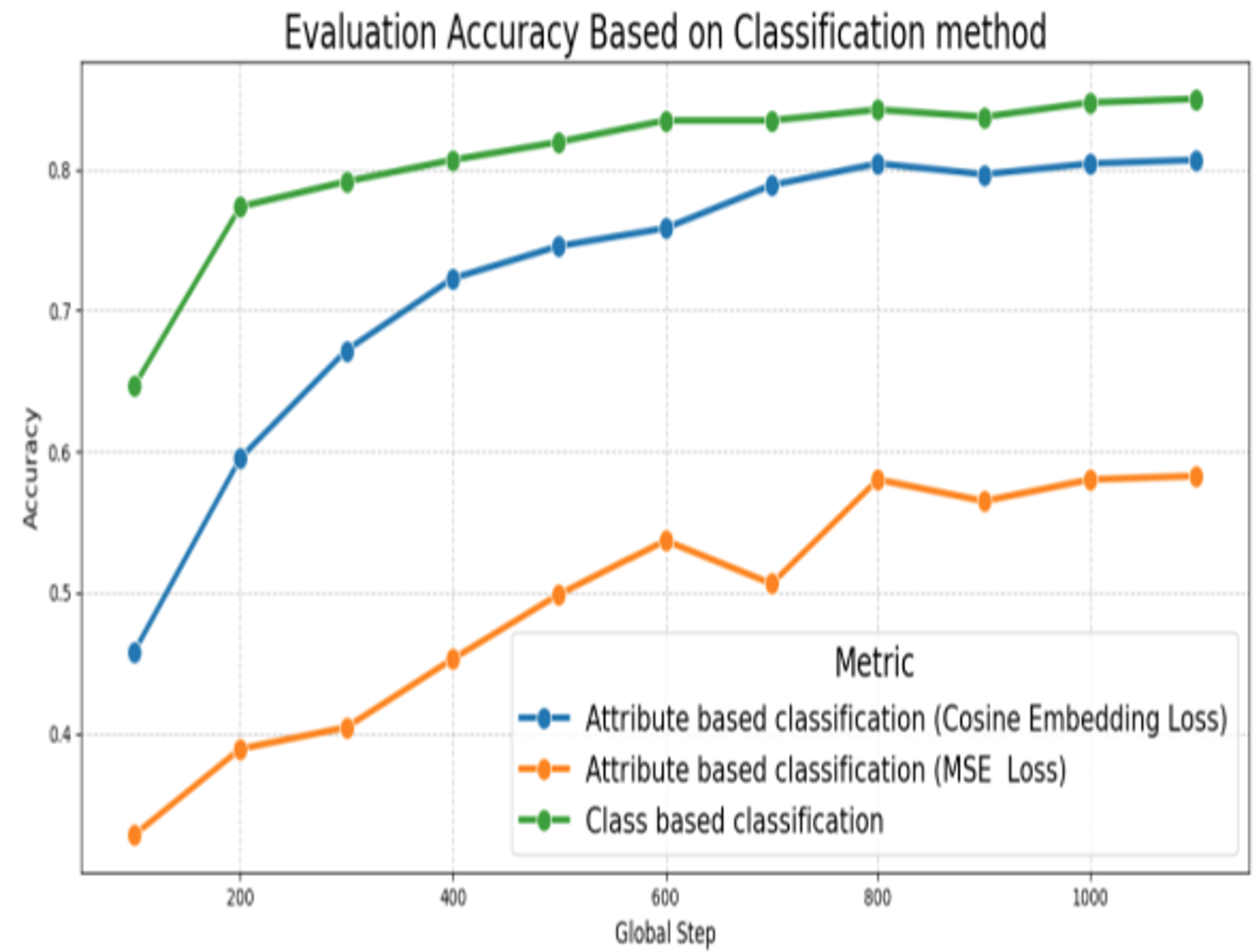
Bird Species Classification Project
Machine Learning project focusing on bird species classirication completed at University of Amsterdam.
Portfolio Website
UX/UI passionate, curated this website from scratch to present my work and aesthetic.
View on GitHub